



GPS全名叫Global Positioning System,全球定位系统,最早起源于美国的军事项目,美国的这种系统叫GPS,我们中国也有全球定位系统,叫北斗;俄罗斯也有,叫格洛纳斯;欧盟也有,叫伽利略。这4套全球定位系统的定位原理基本都是一样的。有了这套系统,我们就可以用它进行导航,引导我们到某地。在军事上可就厉害了,可用于精准打击,可以让导弹到全球各地去捣蛋。其实,GPS除了可以定位,还可以授时,也就是告诉你准确的时间,准确的定位与时间有密不可分的联系。
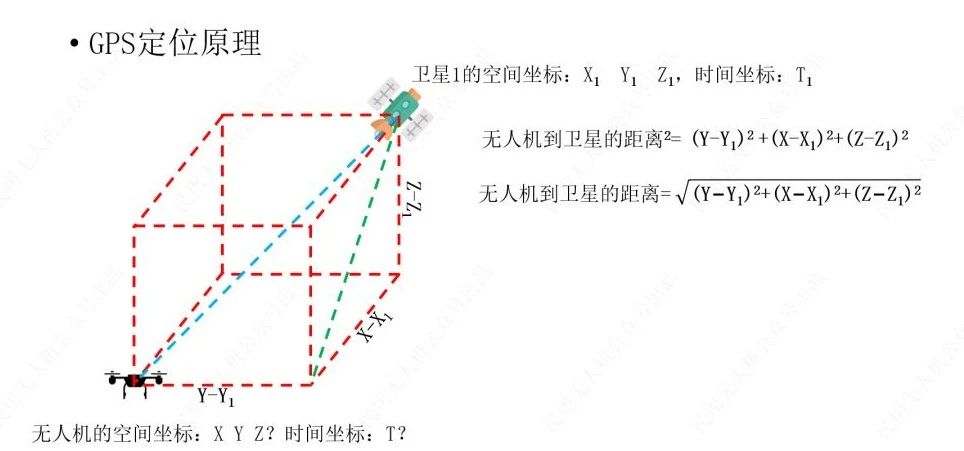
比如我们这里有一个带有GPS的无人机,假设我们不知道这个无人机的空间坐标XYZ,也不知道它的时间坐标T。但是我们可以从卫星这里接收一些信息,也就是卫星的星历,星历里面有卫星自己准确的空间坐标X1 Y1 Z1,同时也有一个准确的时间T1,因为卫星有原子钟。卫星会把这些信息发送给GPS接收机。坐标和时间其实是有一定的联系的,通过坐标和时间我们都可以算出GPS接收机与卫星之间的距离。也就是下图蓝线的长度,通过坐标计算距离就是用勾股定理,无人机到卫星距离的平方=Y-Y1的平方加上这条绿线的长度的平方,绿线长度的平方又等于X-X1的平方加上Z-Z1的平方,所以无人机到卫星的距离等于右面的式子开平方。我们再用时间来求出无人机到卫星的距离,就是信号传输的速度乘以信号传输的时间,也就是光速3?108再乘以T-T1。我们通过这两种方式算出的距离,实际上它们是相等的,所以我们会得到这个方程。
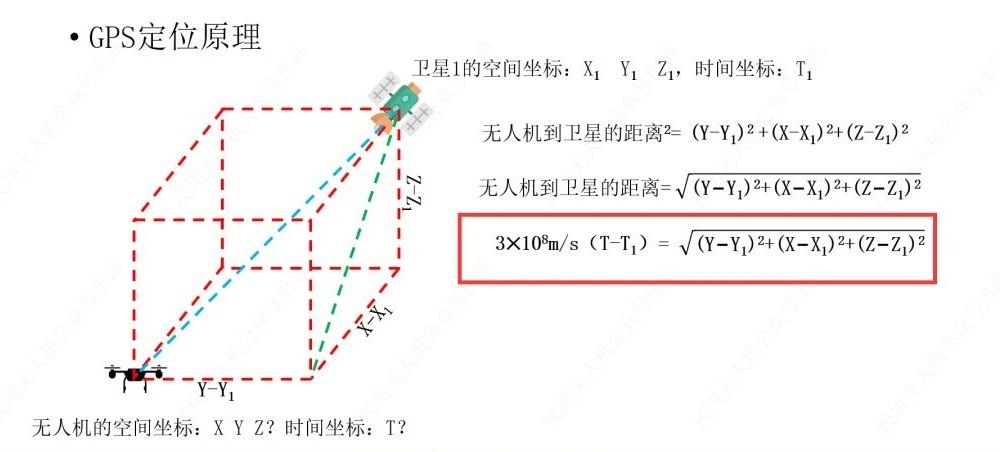
那这个方程里,有4个未知数XYZ和T,通过这一个方程我们是不能解出这4个未知数的。所以我们需要4个这样的方程才可以解出XYZ和T。所以我们再接收3个卫星的数据,我们就可以和到另外3个方程,最终我们就可以解出XYZ和T。
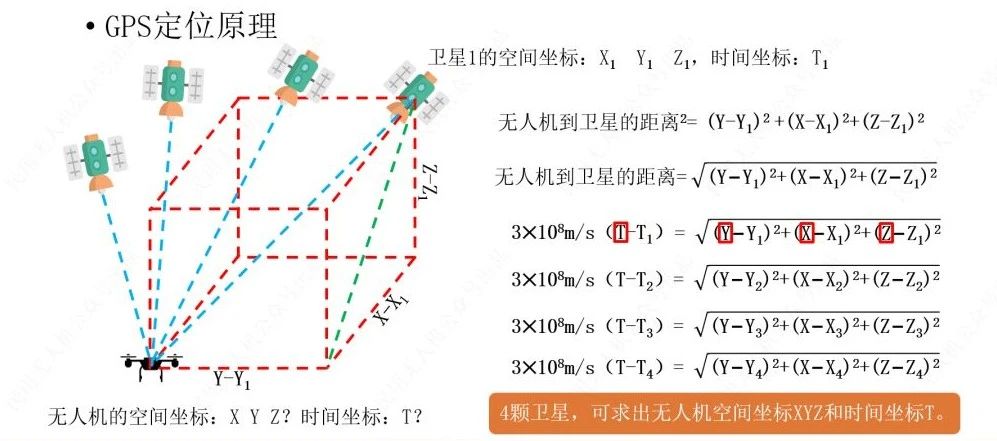
所以,GPS接收机至少要通过4颗卫星,才能确定自己的空间坐标和时间坐标。卫星定位最不好解决的问题就是误差,因为信号在传输的时候,因为大气等因素的影响,速度哪怕慢一丁点,影响都比较大,因为光速特别快,所以GPS的误差一般是在几米到几十米,想要减少误差,我们就要用差分GPS这项技术,它可以大大提高GPS的定位精度。它是在无人机相对较近的已知坐标点上布放一个GPS基准站,它也可以接收到为无人机提供位置信息的4颗卫星的信号,根据这些信号算出坐标值,然后与已知的坐标比较,得出坐标的偏差量,然后将偏差量或者实时测得的载波相位,通过数传链路或移动通信网络发送给无人机,无人机根据接收到的信息进行修正。还可以为无人机在专业的精准定位服务商购买定位服务,通过移动通信网络接收误差更正信息来更修正位置。
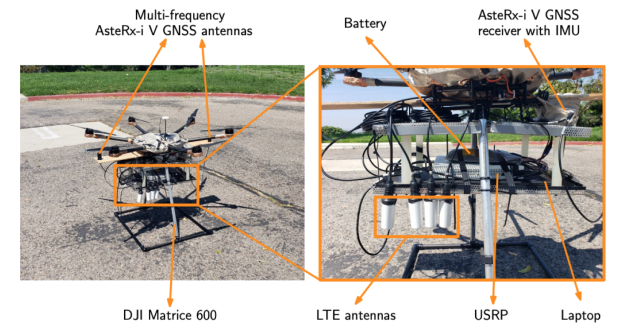
图1 实验硬件装置
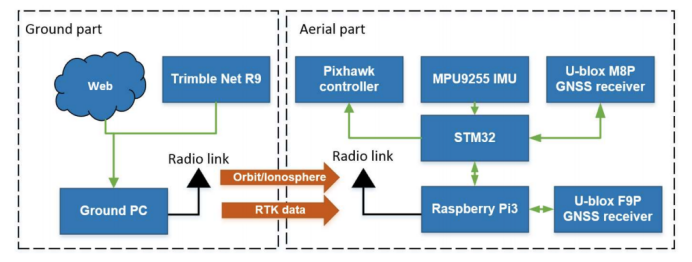
图2 运行模式
(2)PPP与MEMS的松耦合方法。科研人员PPP测试了SUAVS,以获得厘米级定位精度。然而,他们的研究只在任务完成后和使用高端双频GNSS接收机时进行,并不能满足无人机小型化和轻量化的需求。《一种适用于小型无人机的实时低成本PPP和MEMS-INS松耦合地理参考系统的开发与测试》这篇文章中,工作人员设计了4旋翼无人机,并搭载UBlox M8P单频GNSS接收机接收GNSS数据,使用Pixhawk内部的经济型MEMS IMU(MPU9250)的流数据,而单频PPP(SFPPP)的校正数据使用3DR无线电传输,构建了PPP与MEMS的松耦合无人机导航定位系统。在周跳探测与修复的设计中,由于使用单频低成本接收机,常用的MW和GF的探测方法无法使用,科研人员使用了基于多普勒相位预测的单频PPP应答周期滑动检测方法,实验结果表明定位精度可达分米级。
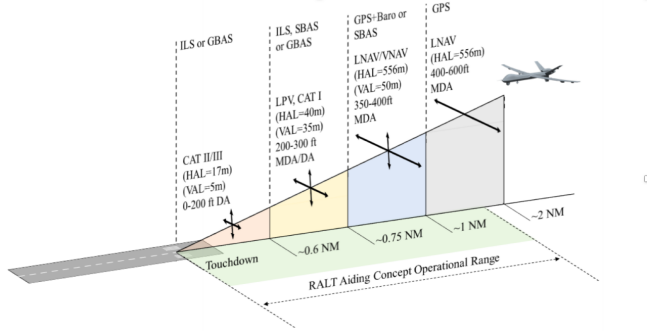
图3 RALT(雷达高度计)辅助作用距离

 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 