


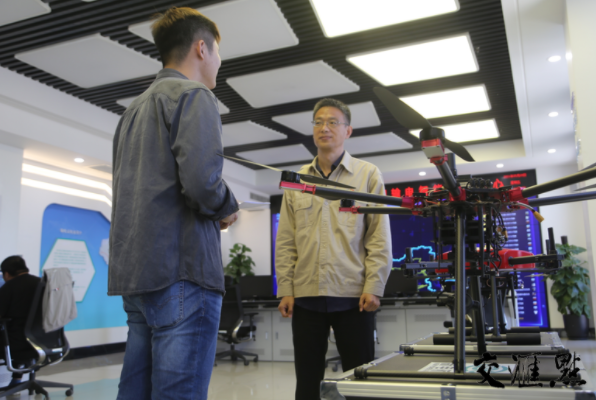
近日,国内首个装载电力内网北斗定位系统的智能飞行巡检机器人在江苏徐州顺利通过试飞性能测试,这标志着电力北斗定位技术在电力系统的落地运用进入新阶段。6月4日, 为确保全市高考期间安全稳定可靠用电,国网徐州供电公司利用搭载了电力内网北斗导航系统的智能飞行巡检机器人对220千伏沙堡线等全市主要供电线路进行了特巡,在完全没有人工干预的情况下,飞行巡检机器人仅耗时14分钟就完成了27、28号杆的巡检工作,而在以往,这项操作需要50分钟以上。

近年来,输电杆塔的精细化巡检成为一大难题。此前输电线路无人机巡检航迹依靠人工采集,尽管技术简单、入门快、易实施,但工作量大、速度慢、成本高,尤其是应用场景不灵活,无法完全适应巡检要求。为解决此问题,今年年初,国网徐州供电公司飞行巡检机器人研发团队对三代智能飞行巡检机器人的结构进行了优化,并安装了电力北斗终端代替GPS定位终端。“我们运用电力北斗 系统作为机器人的定位导航系统,该系统以北斗定位系统为基础,基站和平台之间采用电力内网替代公网链接,极大提升了数据传输的稳定性和安全性。”国网徐州供电公司设备部输电运检专职杨腾腾告诉记者。

据了解,此次智能飞行巡检机器人运用的电力北斗定位系统是国网江苏电力基于北斗系统开发的电力作业专用定位系统。该系统于今年2月份建成,由电力北斗服务平台及部署于省内变电站内的37座地面基准站组成,平台与基站之间通过电力内网连接,能够为江苏全省的电力北斗终端提供高精度定位服务。该平台可提供实时定位的“播发服务”和事后记录终端轨迹的“解算服务”,定位精度分别达到厘米级别和毫米级,可满足不同业务应用的需求。平台支持3万个终端同时连接,可在5000个终端同时发送信息的状态下稳定运行。
通过利用杆塔基础信息库数字化建模和空间三维坐标的自动解算,飞行巡检机器 人无需预飞或扫描即能实现“全自动驾驶”巡检,即航迹自主规划、飞行自主控制、 全程“零”人工干预。“该技术如同为新手司机提供了一款可自主规划规划路线的导航软件,只需输入目的地,就可以得到一条合理的行车路线,巡检机器人只要按照预定的路线飞行即可。”该公司输电运检室主任赵昌新介绍。

值得注意的是,此款飞行巡检机器人还解决了飞控系统与机载云台相机控制系统的深度融合问题,在航迹自主规划模式下,拍摄的照片可进行自主命名、实时回传、分类存储的全自动处理,能够自主完成设备缺陷或隐患的巡检、发现、分析、判别、策略制定、检修工单派发全过程管控,巡检综合效率较传统模式提升近5倍。
除了可以实现高精度、自主化的巡视操作, 该飞行器搭载的电力内网北斗导航系统是另外-个亮点。为解决目前电力系统使用的智能飞行巡检机器人大都采用GPS系统,基站、服务平台和巡检机器人终端之间是通过公网互联,数据传输不够稳定,且安全性得不到有效保障的问题。赵昌新的研发团队对三代智能飞行巡检机器人的结构进行了优化,并按装了电北斗终端代替GPS定位终端。“我们运用电力北斗 系统作为机器人的定位导航系统,该系统以北斗定位系统为基础,基站和平台之间采用电力内网替代公网链接,极大提升了数据传输的稳定性和安全性。”赵昌新说。
除了运用到智能飞行巡检机器人领域外,该公司还将继续探索电力北斗系统在电网设备管理、信息安全和电网运行等领域的运用,“我们将围绕安全管控、 地质灾害监测、调度授时、移动作业等场景,持续加大电力北斗系统在新装备、新设备上的应用范围和规模。为北斗应用产业化发展奠定基础。”赵昌新说。


 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 